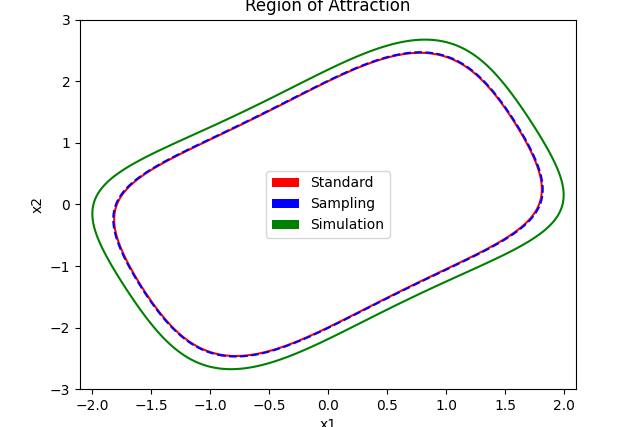
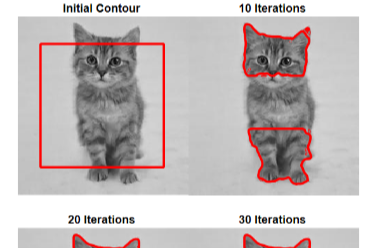
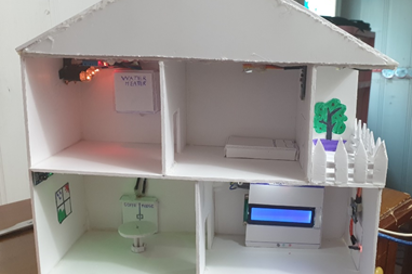
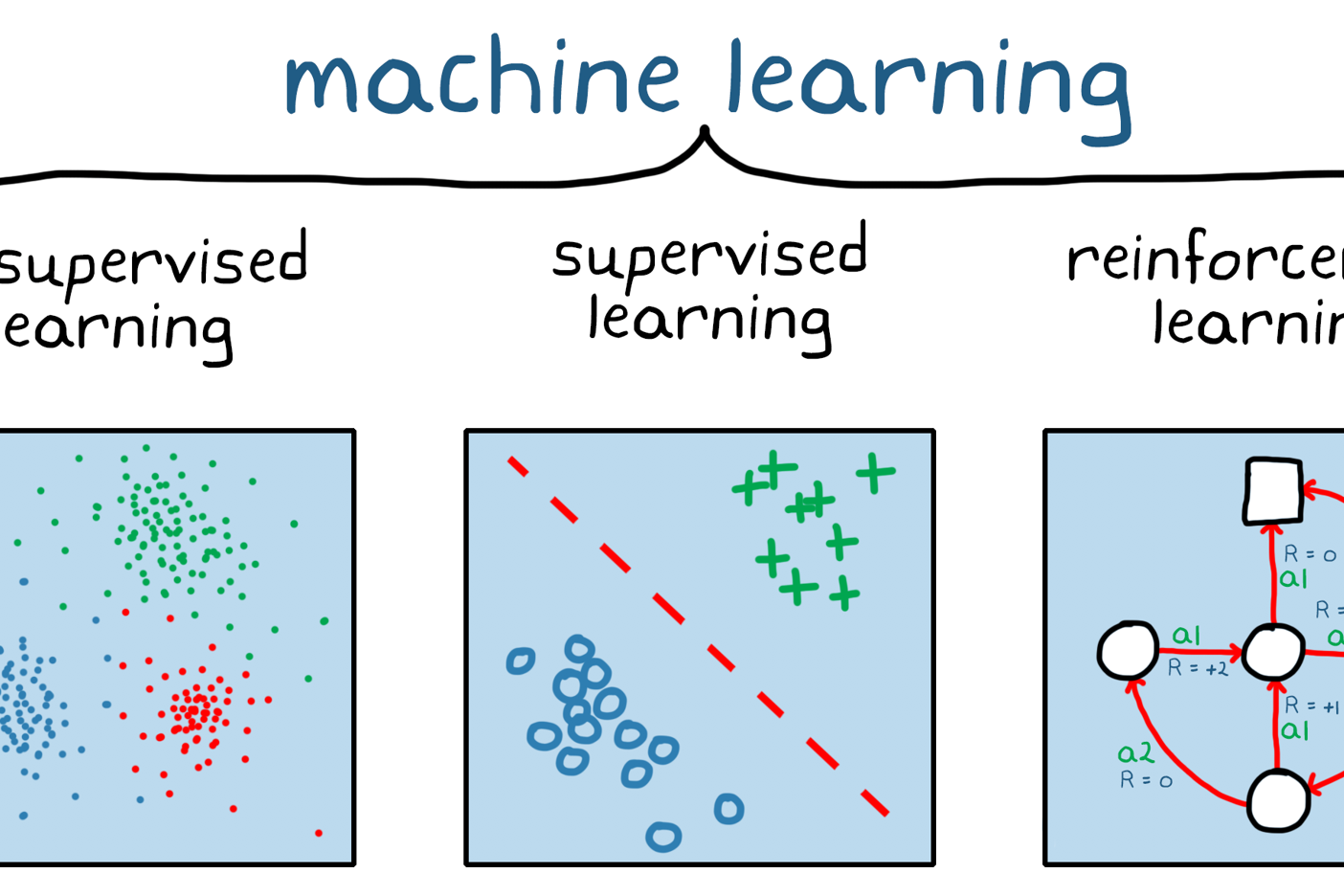
lab TinyMPC fast and low-memory footprint MPC solver for resource-constrained embedded systems Constrained NN enforcing hard constraints on neural networks via differentiable optimization Driving MPC trajectory optimization and model predictive control for autonomous driving Unifying Control and Learning nonlinear systems; adaptive, robust and optimal control; reinforcement learning Wireless Power Transfer static/dynamic wireless charging and power transfer systems for electric vehicles class Breadth vs Depth CMU 16-813: Introduction to Robot Learning - Fall 23. 🤖 Benchmarking Generalists and Specialists in Robot Learning Learned Legibility CMU 24-782: MLAI - Spring 24. 🦾 Viewpoint-Conditioned Legible Motion Planning with Imitation and Reinforcement Learning TinyMPC CMU 16-715: Optimal Control & Reinforcement Learning - Spring 23. 🎮 TinyMPC: Model Predictive Control for Embedded Applications Stability SOS CMU 16-715: Advanced Robot Dynamics & Simulation - Fall 22.🆘 Stability Verification Using Sum-of-Squares Programming Autonomous Flip CMU 24-774: Advanced Control Systems Integration - Fall 22. 🔄 Drone Acrobatics: Autonomous Flip Legged MPC CMU 24-785: Engineering Optimization - Fall 22. 🦿 Quadruped Locomotion Through Nonlinear MPC Blasteroids CMU 24-780: Engineering Computation - Fall 23. 🕹️ Blasteroids: Blast the Asteroids -- A Game Development Project Traffic Light Microprocessors. Automatic Traffic Light System (Assembly language) Battleship Programming Techniques. Battleship Game Development in C/C++ WHRSPF Computer Vision.Image Segmentation Using WHRSPF Algorithm Smart Home IoT. Multi-Functional Secured Smart Home Robot Analysis Robot Engineering. Motoman MPL800 Robot Analysis online manipulation 🦾 MIT 6.4212 - Robotic Manipulation: Perception, Planning, and Control underactuated 🤖 MIT 6.8210 - Underactuated Robotics: Algorithms for Walking, Running, Swimming, and Flying Machine Learning supervised learning, unsupervised learning and reinforcement learning basics Modern Robotics modern robot forward & inverse kinematics, dynamics, motion planning and control Robotic Cars probabilistic inference, planning and search, localization, tracking and control Self-Driving Cars motion planning, control, state estimation and localization of autonomous cars misc F1TENTH 🏁 1/10th-scale autonomous racing MIT-PITT-RW 🏁 full-scale autonomous racing search & rescue ⛑️ (semi-)autonomous UGVs L1AC 🚁 L1 Adaptive Augmentation for Geometric Tracking Control Control System a global project-based learning program on control system design