Khai Nguyen
I am a first-year PhD student at MIT EECS, working on AI and robotics.
I earned my MS at CMU with Zac Manchester in the Robotic Exploration Lab, and my BS in Control Engineering and Automation at HUST. I have also been a Robotics Student Fellow in the Robotic Systems Lab at ETH Zurich, and worked in R&D at VinRobotics and Viettel Aerospace Institute.
email / cv / github / google scholar / linkedin / x
research
I am driven by elegant solution methods that target high performance, safety guarantees, data efficiency, and robust generalization—key milestones toward embodied intelligence.
I explore various theoretical and practical aspects of embodied intelligence, drawing on my background in robotics, controls, differentiable optimization, and machine learning.
news
| Jul 16, 2026 | Contact-UAN won the Best Paper Award at the RSS 2026 Workshop on Robot World Models. |
|---|---|
| Jun 16, 2026 | TD-GRPC was accepted at IROS 2026. |
| May 01, 2026 | I served on the program committee for the RoboARCH workshop at ICRA 2026. |
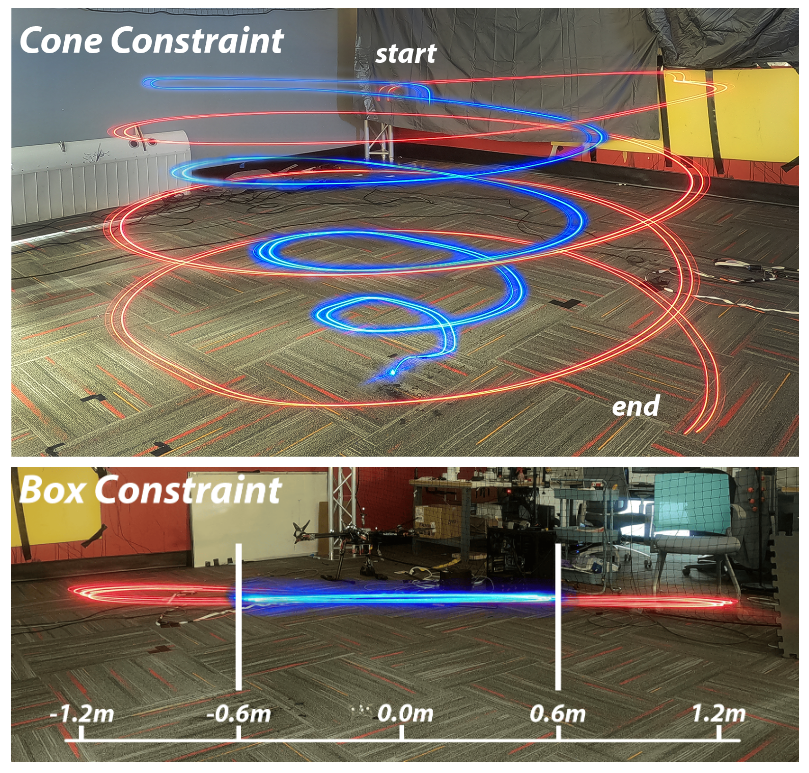
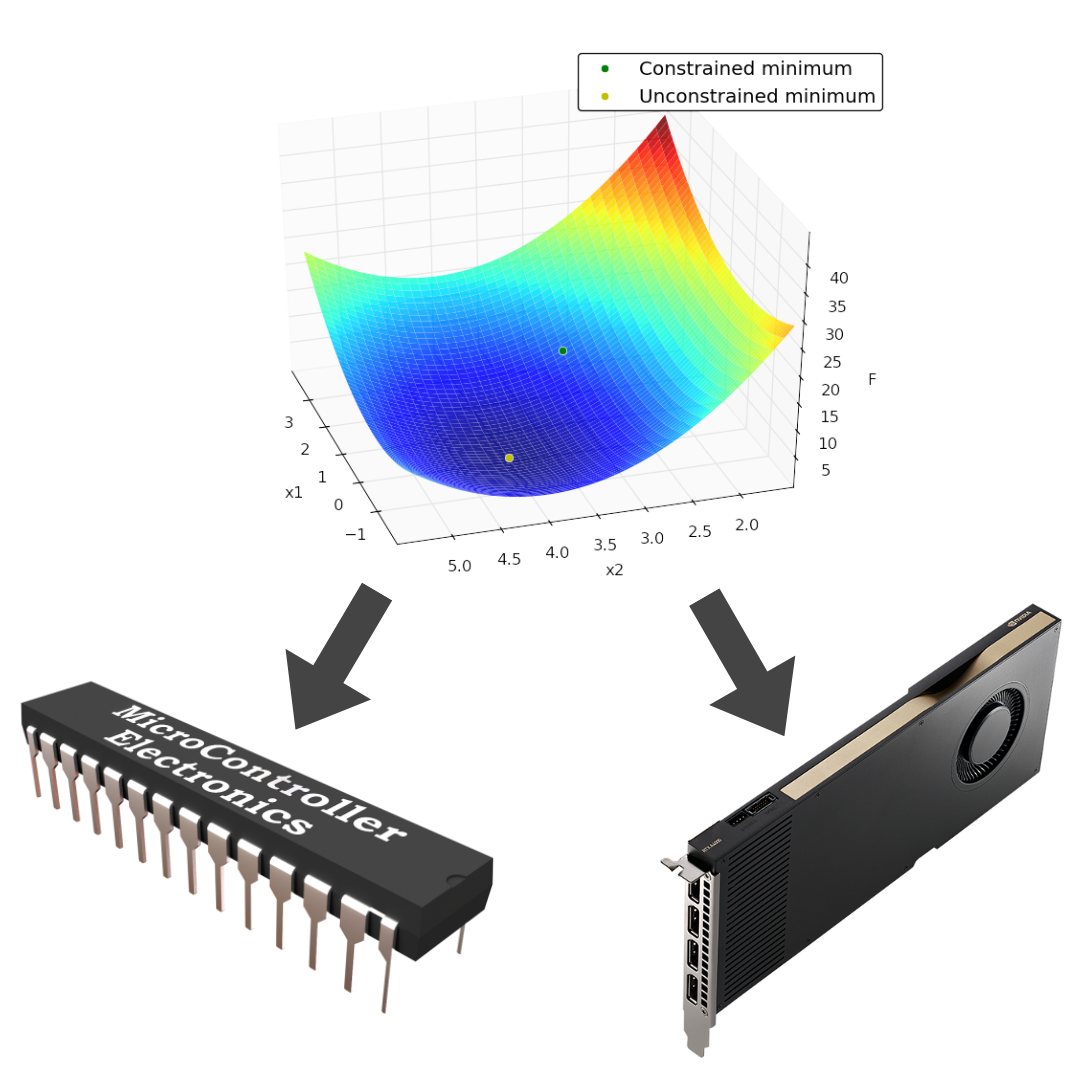
| Jan 01, 2026 | Conic-TinyMPC was accepted at ICRA 2026. |
| Aug 28, 2025 | The humanoid robots I helped build have made their public debut! 🤖 |
| Aug 25, 2025 | I started my PhD at MIT EECS. |
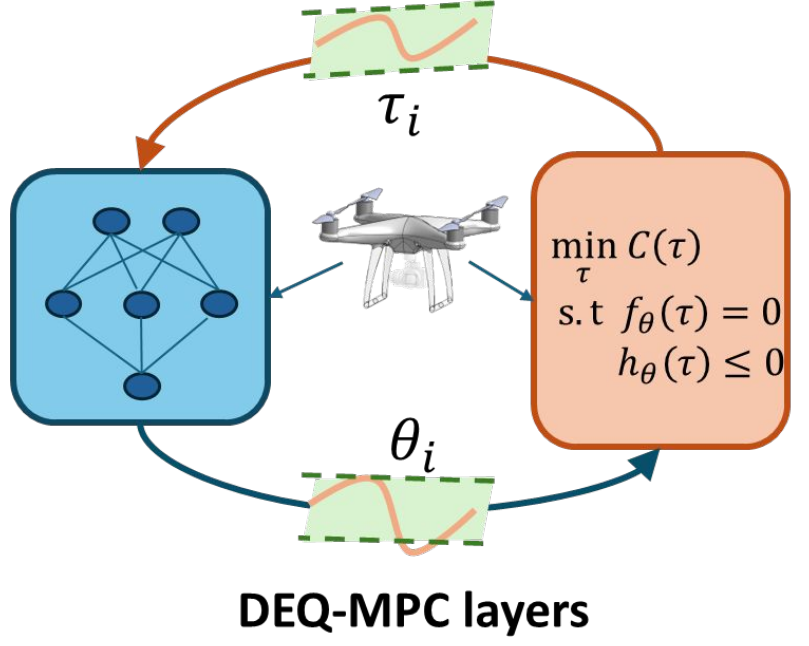
| Aug 01, 2025 | DEQ-MPC was accepted at CoRL 2025, Korea. |
| Jul 28, 2025 | Model Tensor Planning was accepted at TMLR. |
| May 08, 2025 | A proposal was submitted to Amazon Research Award, with Laurent El Ghaoui. |
| May 07, 2025 | Papers were submitted to TMLR, CoRL, Humanoids and workshops, with An, Minh and Swami. |
| Apr 01, 2025 | I served on the program committee for the RoboARCH workshop at ICRA 2025. |
| Oct 25, 2024 | One paper was accepted at CoRL 2024 Workshop Differentiable Optimization Everywhere. |
| Jul 20, 2024 | Our work was featured on the Bitcraze blog – the developers of the Crazyflie. |
| Jul 16, 2024 | We were the Runner-up of Best Poster Award, IEEE TC on Model-based Optimization for Robotics. |
| Jun 28, 2024 | Two papers were accepted at two RSS 2024 Workshops: Frontiers of Optimization for Robotics (Spotlight Talk), and Learning for Assistive Robotics. |
| May 20, 2024 | TinyMPC won the Best Paper Award in Automation at ICRA 2024. |
| Apr 05, 2024 | TinyMPC was selected as a finalist for 03 ICRA Paper Awards. |
| Mar 22, 2024 | TinyMPC with new capabilities is now available on arXiv. |
| Mar 15, 2024 | I received the Best Poster Award at the MS Research Symposium with the TinyMPC poster. |
| Jan 28, 2024 | TinyMPC was accepted to ICRA 2024. |
| Oct 30, 2023 | My undergraduate research on formation control and RL was accepted to IJRNC. |
| Jul 01, 2023 | I participated in the ETH Robotics Summer School. 🤖 |
| Jul 01, 2023 | I started my ETH Robotics Student Fellowship at RSL. |
| May 08, 2023 | My team advanced to the semi-finals of the F1TENTH competition. |
| Sep 01, 2022 | I joined Zac Manchester in the Robotic Exploration (REx) Lab. |
| Aug 29, 2022 | I started my graduate study at Carnegie Mellon University. |
selected publications
- IROSTD-GRPC: Temporal Difference Learning with Group Relative Policy Constraint for Humanoid LocomotionInternational Conference on Intelligent Robots and Systems (IROS), 2026
- ICRA
 TinyMPC: Model-Predictive Control on Resource-Constrained MicrocontrollersInternational Conference on Robotics and Automation (ICRA), 2024🏆 Best Paper Award in Automation at ICRA 2024
TinyMPC: Model-Predictive Control on Resource-Constrained MicrocontrollersInternational Conference on Robotics and Automation (ICRA), 2024🏆 Best Paper Award in Automation at ICRA 2024
🏆 Finalists of Best Conference Paper Award and Best Student Paper Award at ICRA 2024
🏆 Best Poster Award at CMU MechE Symposium ~ 10%
🏆 Runner-up of Best Poster Award, TC on Model-based Optimization for Robotics ~ 10%